 Das Austrian Institute of Technology (AIT) hat gemeinsam mit vier Forschungspartnern untersucht, wie gut sich die Verkehrsinfrastruktur der Alpenrepublik für automatisierte Fahrzeuge eignet. Mit an Bord waren die EDV-Dienstleister Prisma Solutions, die Verkehrsplaner Rosinak & Partner, das F&E-Zentrum Virtual Vehicle und die Wieser Verkehrssicherheit GmbH.
Das Austrian Institute of Technology (AIT) hat gemeinsam mit vier Forschungspartnern untersucht, wie gut sich die Verkehrsinfrastruktur der Alpenrepublik für automatisierte Fahrzeuge eignet. Mit an Bord waren die EDV-Dienstleister Prisma Solutions, die Verkehrsplaner Rosinak & Partner, das F&E-Zentrum Virtual Vehicle und die Wieser Verkehrssicherheit GmbH.
Automatisierte Fahrzeuge sind derzeit in der Regel auf gut ausgebaute Überlandstraßen angewiesen: mit Leiteinrichtungen und deutlichen Bodenmarkierungen, gut lesbaren Verkehrszeichen und uneingeschränkten Sichtbeziehungen. Doch über weite Strecken liefert das über 190.000 km lange österreichische Straßennetz diese Bedingungen nicht. Ein entsprechender Ausbau ist auch nicht finanzierbar.
Automatisierte Fahrzeuge mit Standardsituationen überfordert
 „Man muss einen anderen Weg gehen und sich anschauen, wo problematische Straßenabschnitte sein könnten, und wie sich solche Hot-Spots für automatisierte Fahrzeuge bewerten lassen“, erklärt via-AUTONOM-Projektleiter Philippe Nitsche vom AIT. „Wir haben in der virtuellen Simulation anhand von zwei anspruchsvollen Standard-Verkehrssituationen untersucht, was State-of-the-art-Fahrzeugsensoren derzeit überhaupt leisten können.“ In der einen Situation musste das Fahrzeug auf einer benachrangten T-Kreuzung links abbiegen; in der der anderen sich über die Distanz eines 200 m langen Beschleunigungsstreifens, wie er real auf der A2 existiert, in den Autobahnverkehr einreihen. Das ernüchternde Ergebnis: Die automatisierten Fahrzeuge meistern beide Situationen nicht ausreichend gut ohne zusätzliche Infrastrukturmaßnahmen: Von 800 Versuchen beim Einfädelexperiment waren nur 52 % erfolgreich; bei 600 Simulationen an der T-Kreuzung waren es nur 40 %. Dabei wurde von einer StVO-konformen, vorsichtigen Fahrweise ausgegangen. In der Simulation implementierte Infrastrukturmaßnahmen, wie z. B. eine Verlängerung des Beschleunigungsstreifens, aber auch ein Kreuzungsassistent im Falle der T- Kreuzung, halfen aber, das korrekte Einordnen in den Verkehr wesentlich zu verbessern.
„Man muss einen anderen Weg gehen und sich anschauen, wo problematische Straßenabschnitte sein könnten, und wie sich solche Hot-Spots für automatisierte Fahrzeuge bewerten lassen“, erklärt via-AUTONOM-Projektleiter Philippe Nitsche vom AIT. „Wir haben in der virtuellen Simulation anhand von zwei anspruchsvollen Standard-Verkehrssituationen untersucht, was State-of-the-art-Fahrzeugsensoren derzeit überhaupt leisten können.“ In der einen Situation musste das Fahrzeug auf einer benachrangten T-Kreuzung links abbiegen; in der der anderen sich über die Distanz eines 200 m langen Beschleunigungsstreifens, wie er real auf der A2 existiert, in den Autobahnverkehr einreihen. Das ernüchternde Ergebnis: Die automatisierten Fahrzeuge meistern beide Situationen nicht ausreichend gut ohne zusätzliche Infrastrukturmaßnahmen: Von 800 Versuchen beim Einfädelexperiment waren nur 52 % erfolgreich; bei 600 Simulationen an der T-Kreuzung waren es nur 40 %. Dabei wurde von einer StVO-konformen, vorsichtigen Fahrweise ausgegangen. In der Simulation implementierte Infrastrukturmaßnahmen, wie z. B. eine Verlängerung des Beschleunigungsstreifens, aber auch ein Kreuzungsassistent im Falle der T- Kreuzung, halfen aber, das korrekte Einordnen in den Verkehr wesentlich zu verbessern.
Verkehrssimulation liefert Entscheidungsgrundlage für Investitionen
Im Rahmen von via-AUTONOM konnte belegt werden, dass die angewandten virtuellen Verkehrssimulationen prinzipiell geeignet sind, die Wirkungen von Infrastrukturmaßnahmen auf die Sicherheit und den Verkehrsfluss quantitativ zu evaluieren. D. h. die Ergebnisse aus wissenschaftlich fundierten Versuchen im Simulator sind prinzipiell zuverlässig und können als Entscheidungsgrundlage für gezielte Investitionen dienen.
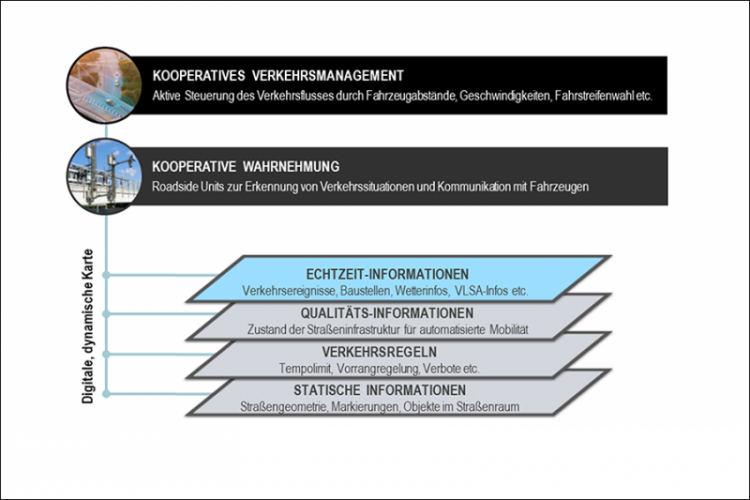 Weiters ergab via-AUTONOM, dass automatisierte Fahrzeuge dynamische Daten brauchen, damit sie erkennen können, wo und unter welchen Bedingungen sie selbstständig fahren können. Diese Grenzen werden in der sogenannten Operational Design Domain (ODD) der Autos festgelegt. „Die automatisierten Fahrzeuge müssen selbstständig erkennen, wenn die ODD an ihre Grenzen stößt, damit die Kontrolle an den Menschen abgegeben bzw. ein Notstopp eingeleitet werden kann“, sagt Philippe Nitsche. Die Fahrzeuge müssen also jederzeit wissen, welche Routen die ODD-Bedingungen aktuell erfüllen oder nicht erfüllen. Die digitalen Karten, mit denen die Fahrzeuge navigieren, müssen dazu auf dynamische Daten zugreifen können, in denen Echtzeit-Informationen über den Zustand einer Strecke wiedergegeben werden und z. B. Schneeverhältnisse oder Baustellen berücksichtigt sind. Um in Zukunft die benötigten digitalen Daten für eine dynamische Routenplanung bereitstellen zu können, braucht es die Synergie zwischen öffentlicher Hand und kommerziellen Datenanbietern.
Weiters ergab via-AUTONOM, dass automatisierte Fahrzeuge dynamische Daten brauchen, damit sie erkennen können, wo und unter welchen Bedingungen sie selbstständig fahren können. Diese Grenzen werden in der sogenannten Operational Design Domain (ODD) der Autos festgelegt. „Die automatisierten Fahrzeuge müssen selbstständig erkennen, wenn die ODD an ihre Grenzen stößt, damit die Kontrolle an den Menschen abgegeben bzw. ein Notstopp eingeleitet werden kann“, sagt Philippe Nitsche. Die Fahrzeuge müssen also jederzeit wissen, welche Routen die ODD-Bedingungen aktuell erfüllen oder nicht erfüllen. Die digitalen Karten, mit denen die Fahrzeuge navigieren, müssen dazu auf dynamische Daten zugreifen können, in denen Echtzeit-Informationen über den Zustand einer Strecke wiedergegeben werden und z. B. Schneeverhältnisse oder Baustellen berücksichtigt sind. Um in Zukunft die benötigten digitalen Daten für eine dynamische Routenplanung bereitstellen zu können, braucht es die Synergie zwischen öffentlicher Hand und kommerziellen Datenanbietern.
Reibungslose Abwicklung, hervorragende Zusammenarbeit
Das Projekt via-AUTONOM wurde im Rahmen der 6. Ausschreibung des Programms „Mobilität der Zukunft“ gefördert. „Die Abwicklung verlief vollkommen reibungslos, die Zusammenarbeit mit den Mitgliedern des Konsortiums war hervorragend“, resümiert Projektleiter Philippe Nitsche. Und zum Benefit der Projektförderung befragt, sagt der Verkehrsinfrastrukturexperte: „Ohne Förderung durch die FFG wäre die Aufarbeitung in diesem Umfang in dieser Zeit nicht möglich gewesen. Auch lassen sich mehr Stakeholder erreichen, wenn ein Projekt im Rahmen eines FFG-Programms gefördert wird.“


Projektleiter: Dr. Philippe Nitsche
Austrian Institute of Technology (AIT)
Tel. 050550-6517
[email protected]
Projektpartner: